Projects
Distributed Fault Diagnosis for Nonlinear Large-Scale Stochastic Systems
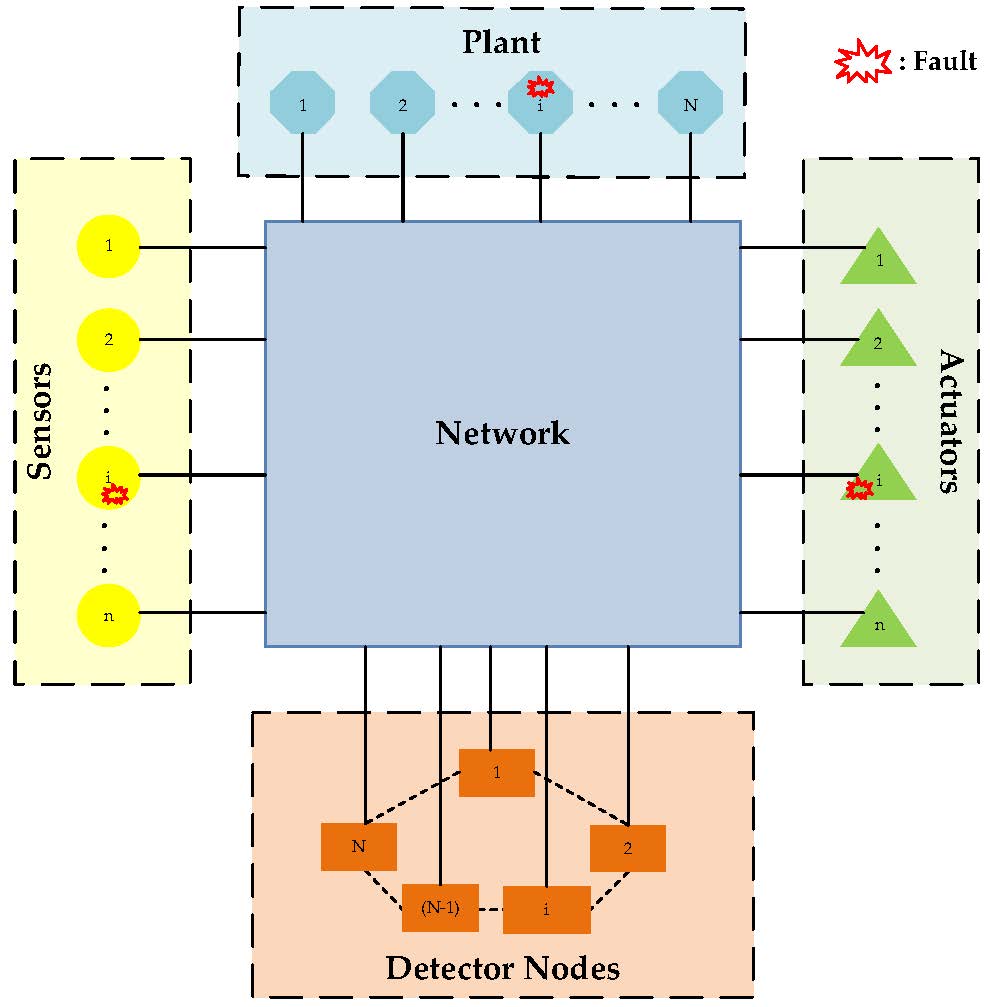 |
The goal of this project is to establish an analytical and computational foundation for distributed fault diagnosis algorithms for nonlinear, large-scale stochastic systems. Complex processes are significantly more vulnerable to faults, as a malfunction in a single component may impact the entire system. Our work formulates the problem of fault-diagnosis in a non-centralized way, making it applicable to real-life, large-scale systems. The monolithic process is monitored by a network of interconnected diagnostic nodes with local processing and communication capabilities.We are working on analytical tools for obtaining global inference about the health of the system based on local observations and information exchange. This aim targets high-dimensional processes with geographically sparse subcomponents. Our work focuses on the derivation of data fusion protocols that work on parallel with estimation-based failure-sensitive filters. |
Distributed Source Tracing
 |
Source tracing is a search and localization task where the main goal is to identify the location of a toxic substance emitter from its gaseous plume. The prompt hazardous source localization is a safety-critical component of numerous environmental, commercial and military applications. The primary motivation for substituting first responders by autonomous robots is to minimize or even eliminate the human exposure to the potentially lethal toxin. The mobile robotic detectors are not constrained by human limitations such as fatigue or inattentiveness. The chemical source tracing can become significantly faster and reliable if a swarm of communicating mobile robots is deployed instead of a singleton unit. The theoretical approach of this work targets real-life scenarios where a large geographical region is monitored by a finite number of interconnected sensors (potentially mobile). We apply a model-based approach where the concentration of the chemical source is represented by a spatial and time varying mathematical model. The challenge is to estimate the parameters of the plume's model by a sequence of noise infested spatial measurements. We investigate distributed sampling methods in order estimate the source location and intensity. At each iteration, the filtered estimates are used to transport the robot towards the source while maximizing the likelihood of the acquired observations. |
Fault Diagnosis for Networked Multi-Agent Systems
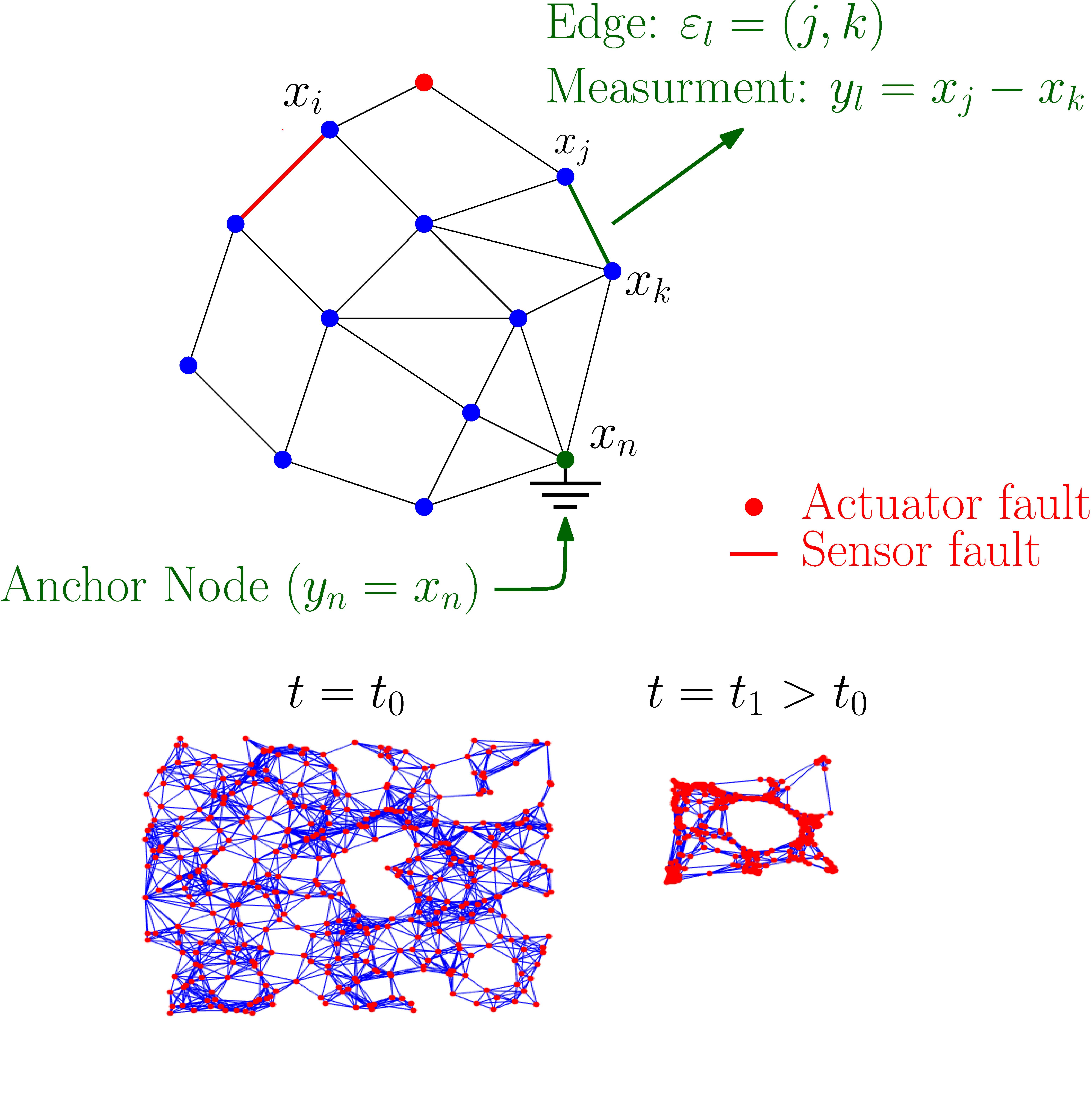 |
Even though distributed control algorithms have been well investigated for mobile robotic swarms, there are only few distributed FD methods for this class of systems. The development of a distributed FD scheme for networked robots is challenging due to the distributed nature of the system and the limited information shared among the nodes. The ability of a monitoring system to diagnose and isolate faults is analytically quantifiable trough its Detectability, Isolability and Identifiability (DII) properties. In this project, we investigate the DII properties for multi-agent systems that are executing the agreement protocol and are subject to both sensor and actuator faults. We adopt a geometric multivariable control approach for the synthesis of observer-based failure-sensitive filters with prescribed performance. This primary centralized treatment of the multi-agent problem is pivoted to the design of distributed for large-scale linear systems. |
Warehouse Automation – Multi-Robot Coordination
 |
In the recent years, Autonomous Guided Vehicles (AGVs) are gradually integrated to warehouse management systems. The employment of AGVs has numerous advantages over conventional warehouse systems in terms of cost, scalability and efficiency. In this project, we present the development of a small-scale test-bed platform for testing and validating warehouse automation control algorithms utilizing a swarm of AGVs. The proposed platform is scalable, fast, and effective in both cost and dimensions. The robotic drives are centimeter-scale forklifts that transport autonomously an arbitrary number of circular pallets to predefined reference locations. This work is extended to the multi-agent coordination of robotic fleets that operate in cluttered industrial layouts. |
Large-Scale Actuator Networks: The Morphing Surface
 |
A class of cyber-physical systems that is gradually attracting increased scientific attention is Large-Scale Actuator Networks (LSAN). A prospective application of actuator networks is distributed manipulation. Distributed manipulation has the potential to become a game-changing technology in the area of industrial automation. To examine this class of systems, this paper presents a reactive elastic surface that autonomously morphs its shape by using a grid of linear actuators to transport an object into a target location. The combined action of the actuator grid overcomes the limitations of individual actuators, resulting in a system with multiple degrees-of-freedom. |